Subsections
The innovative Transport Simulator by MAIT international e.V.
is an easy-to-use micro-simulator software, intended to
simulate and evaluate a set of ``innovative transportation
systems''. The software has been developed according to the
MAIT system
specifications, and software
specifications, presented at the MAIT Meeting
2001, Loughborough, UK. its-0.51
also satisfies the specifications for the PRT simulation software
articulated by the EUNITRANS group during the Automated People Mover
conference APM'99, Copenhagen, Denmark.
Even though the ultimate intention for this software is the simulation of a
complete MAIT system, its current
use is focused on PRT or AGV systems.
Essentially, the software predicts performance and cost
figures of a specified system. The input data will include the
network topology and assumed demand-patterns, maximum accelerations,
line-speed, boarding-times, component-costs, etc. Output data will
include waiting times, journey times, running costs and capital costs.
The performance-relevant technologies implemented are
- a novel version of a vehicle follower control algorithm. This
control system is thought to allow close-to-physically achievable
results (see also the discussion under ``Carriers'' in
Sec. 5.1).
- Acceleration at stops, diverge and merge behavior.
- Boarding behavior at stops. Currently are two modes implemented:
- Synchronous mode, where the stop is divided into a
loading and unloading area.
- Asynchronous mode, where users can queue up at all berth
of the stop and enter the next available vehicle.
- Shortest estimated travel-time routing. (See
Sec. 1.3 under logistics.) Considerable higher
throughputs in high-density traffic operation are expected from a
global logistic operation system, which is not yet implemented.
The software has been designed to obtain a holistic
view of the simulated transportation system. For this reason it
covers (or will cover) a variety of system aspects such as:
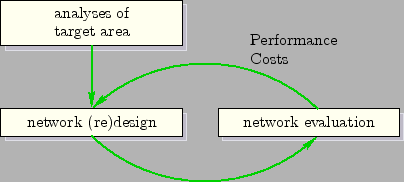
- Network design and planning, i.e traffic flow/ traveling speed/
waiting times etc. for a given network layout and origin-destination
demand patterns. (See scheme of Fig. 1.)
- Cost- and performance analysis i.e prediction of passenger km,
vehicle usage, expected investment and operating&maintenance costs,
economy of scale, etc.
- Support for technological development of vehicles and
infrastructure i.e to incorporate upgrades to modularization and interfaces,
control systems, server-networks, logistics, management
systems, etc.
- Support for implementation, test and integration, so that simulated
hardware modules, such as vehicles and track, can be replaced by
their real physical systems, while the logistics/management modules
of the software can continue to control the real network-- with
almost no modifications.
- Support for geometrical design, study of visual impact and
promotion i.e to provide 3D output of simulated network.A simple, but realtime 3D-viewer has been implemented.
For currently implemented features see Sec 1.3.
Figure 1:
Network design cycle.
 |
Because the simulator covers a large number of development and
implementation issues, it is of interest to:
- system developers,
- manufacturers,
- transport experts, consultants, town planners, architects,
- potential operators and
- anybody who dreams of a better way to transport people
and goods.
1.3 Currently implemented features
- Easy to use transportation network editor: Track
elements, vehicles and users can be selected from a library and
placed and edited on the canvas with a graphical 2D network
representation. Scanned maps of the target region can be used as
background images. The number of different network components (track
elements, vehicle-types, users) is still limited but is expected to
grow rapidly. Anyway, new track elements can be easily created by
copying and editing library text-files.
- Vehicle dynamics: The vehicles are using a
vehicle-follower control algorithm. Speed-limits, maximum
comfort/emergency/safety acceleration, brake actuation time are
respected. Jerk is not simulated explicitly, but jerk limits can be
introduced implicitly such that the average vehicle distances are
represented correctly--as if jerks were simulated. All parameters
can be modified via GUI interfaces (in this case called
``control-panels''). For more information on control issues, see
Sec. 5.1 under carriers and Sec. 5.3.
- Passenger-behavior: Currently there are two types of
passengers implemented:
- generic user: this user is making one trip during the
simulation, where the origin and destination stop are indirectly
determined by a origin-to-destination matrix. See
Sec. 4.1 on how to use this feature.
- test-driver: This user makes one random trip after
another. He has been mainly created for test purposes.
- Logistics: Currently three management modules are
implemented:
- Passenger management, which is the only one that interfaces
directly with passengers.
- Carrier management, allocates a vehicle to the passenger
management. Optimized empty vehicle management.
- Track management, knows the network topology, instructs all
diverge points to direct the vehicle on the fastest way to the desired
destination.
For more information, see management objects in Sec. 5.1
and Sec. 5.2. .
- Analysis and validation: The current data about each
module, i.e vehicles, users, track, managements, can be displayed via
control-panels. The data contains module-dependent information about
- Performance, e.g throughput, average speed, waiting
times, traveled passenger km, etc.
- Economics, e.g initial investment, annual costs, trip costs, etc. and
Importantly: Economy of scale. Costs, that depend on the
quantity (or length) of modules can be edited in a quantity/prices
table. The software will then automatically compute the price,
dependent on the size of the network, number of vehicles, etc.
- important parameters, such as accelerations, line-speed,
etc. Most of these parameters can be interactively changed.
- Export results: the most significant data of the current
simulation, i.e parameters, performance and costs, can be exported as a
tab-separated text file, which is easily imported into all
spread-sheet applications such as Excel, kspread, star-office or
Gnumeric.
- Save and load: the current state of the simulated
network, including vehicles, users and managements, can be saved at
any time into a simulation file. This simulation file can be
reloaded and the simulation continued from the state when the
network was saved.
- Command-line mode: the simulation of a previously edited
and saved network can be launched also without graphics. In the
Command-line mode simulation times can be reduced considerably. It
also allows to run the simulation within scripts or as a batch
process. Read more in Sec 4.3.
- Scripting: the simulation of a previously edited and
saved network can be used in scripts. Parameterized vehicles and
passengers can be added within the script and results can be saved
automatically, see Sec 4.2.
Joerg Schweizer
2007-07-17